
Nowa era precyzyjnej nawigacji w medycynie i nie tylko
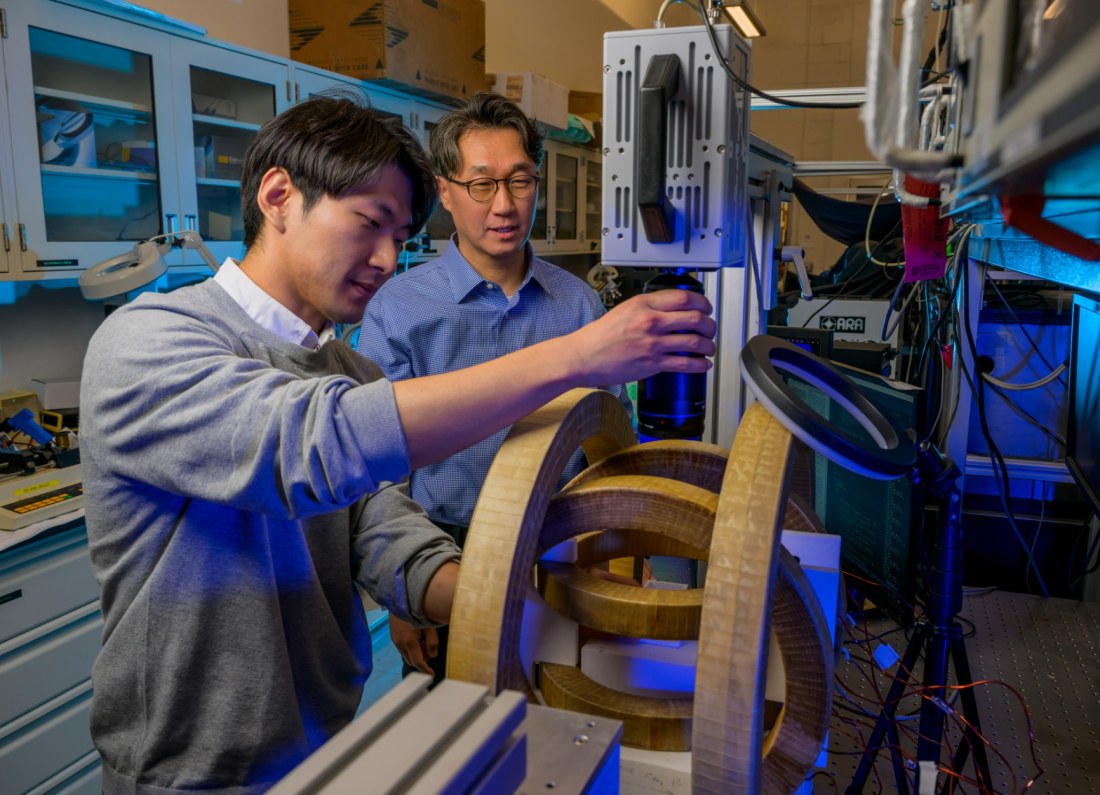
Wyobraź sobie prowadzenie samochodu z zawiązanymi oczami, polegające wyłącznie na wcześniej zaplanowanej trasie i wewnętrznym wyczuciu kierunku. Brzmi jak science-fiction, ale właśnie taki poziom autonomiczności osiągnęli naukowcy z Southern Methodist University (SMU) w Dallas, opracowując system sterowania mikrobotami, który nie wymaga ciągłego monitorowania wizyjnego. To rozwiązanie może otworzyć drzwi do zupełnie nowych zastosowań w medycynie, przemyśle i badaniach naukowych.
Koniec zależności od kamer i monitorów
Tradycyjne metody sterowania mikroskopijnymi robotami polegały na nieustannej obserwacji. Operator musiał śledzić pozycję robota za pomocą kamer lub skanerów medycznych (np. MRI), a następnie ręcznie korygować jego ruch, wysyłając sygnały magnetyczne. Ten proces, choć skuteczny, był jak próba prowadzenia pojazdu z kimś, kto co sekundę zerka na ekran monitoringu. Ograniczało to zastosowania do środowisk, gdzie takie obrazowanie jest możliwe, a sama procedura była czasochłonna i wymagała zaawansowanej infrastruktury.
System opracowany przez zespół z SMU działa na innej zasadzie. Mikroboty są wyposażone w maleńkie czujniki pola magnetycznego. Zamiast śledzić, gdzie robot się znajduje, system precyzyjnie kontroluje siłę i kierunek pola magnetycznego w otoczeniu, a robot, wyczuwając te zmiany, wykonuje zaprogramowaną sekwencję ruchów. To jak dawanie robotowi szczegółowej mapy i kompasu, zamiast prowadzenia go za rękę.
Potencjalne zastosowania: od dostarczania leków po mikroprodukcję
Ta nowa autonomia otwiera fascynujące możliwości:
- Medycyna precyzyjna: Mikroboty mogłyby dostarczać leki bezpośrednio do chorych tkanek, np. guzów nowotworowych, poruszając się po skomplikowanych naczyniach krwionośnych bez konieczności ciągłego obrazowania pacjenta promieniami X.
- Mikroinżynieria i montaż: W przemyśle mogłyby precyzyjnie manipulować mikroskopijnymi komponentami lub przeprowadzać lokalne naprawy w trudno dostępnych miejscach maszyn.
- Badania naukowe: Pozwoliłyby na autonomiczne eksplorowanie mikrośrodowisk, na przykład wewnątrz żywych komórek, minimalizując ingerencję z zewnątrz.
Kluczem jest przejście od sterowania reaktywnego, opartego na sprzężeniu zwrotnym z obrazu, do sterowania predykcyjnego i planowanego. Robot wie, jaki ruch ma wykonać, ponieważ środowisko magnetyczne jest kontrolowane z niezwykłą precyzją
Technologia ta jest na wczesnym etapie rozwoju, ale jej implikacje są ogromne. Eliminując potrzebę drogiego i skomplikowanego sprzętu do obrazowania, może znacznie obniżyć koszty i zwiększyć dostępność zaawansowanych procedur medycznych oraz przemysłowych. To krok w stronę prawdziwej autonomii w mikroskali, gdzie maleńkie maszyny będą mogły działać tam, gdzie wzrok ludzki czy kamery po prostu nie sięgają.
Foto: konto.chip.pl














Leave a Reply